テキストを書き込む場合も、画像と同じ要領です。
<?php
$short = '2018/02/26 Credit Suisse Securities 0.470% -0.150% 42,700株 -13,300\n';
file_put_contents("sample.txt", $short);
?>
書き込まれました。
追加する場合は、第三引数にFILE_APPENDとします。
<?php
$short = "2018/02/27 Nomura International 5.940% +0.250% 535,100株 +22,700\r\n";
file_put_contents("sample.txt", $short, FILE_APPEND);
?>
上手く追加されてますね。
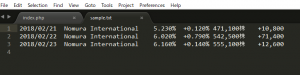
ではテキストを配列で持っていた場合はどうでしょうか? foreachで回してみます。
<?php
$short = array(
"2018/02/21 Nomura International 5.230% +0.120% 471,100株 +10,800\r\n",
"2018/02/22 Nomura International 6.020% +0.790% 542,500株 +71,400\r\n",
"2018/02/23 Nomura International 6.160% +0.140% 555,100株 +12,600\r\n"
);
foreach($short as $value){
file_put_contents("sample.txt", $value, FILE_APPEND);
}
?>
おおお、入ってますね。少し感動しました。