#include <GL/glut.h>
void display(void){
glClear(GL_COLOR_BUFFER_BIT);
glRotated(25.0, 0.0, 1.0, 0.0);
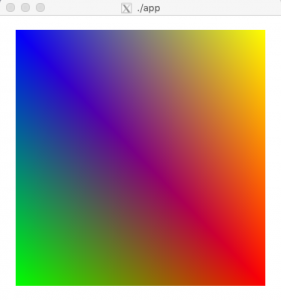
glBegin(GL_POLYGON);
glColor3d(1.0, 0.0, 0.0);
glVertex2d(-0.9, -0.9);
glColor3d(0.0, 1.0, 0.0);
glVertex2d(0.9, -0.9);
glColor3d(0.0, 0.0, 1.0);
glVertex2d(0.9, 0.9);
glColor3d(1.0, 1.0, 0.0);
glVertex2d(-0.9, 0.9);
glEnd();
glFlush();
}
void init(void){
glClearColor(1.0, 1.0, 1.0, 1.0);
}
int main(int argc, char *argv[]){
glutInit(&argc, argv);
glutInitDisplayMode(GLUT_RGBA);
glutCreateWindow(argv[0]);
glutDisplayFunc(display);
init();
glutMainLoop();
return 0;
}
glRotated() による回転の行列が積算されている
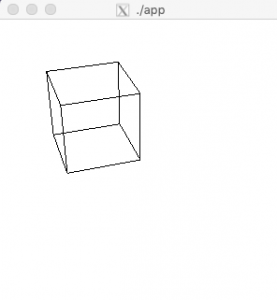
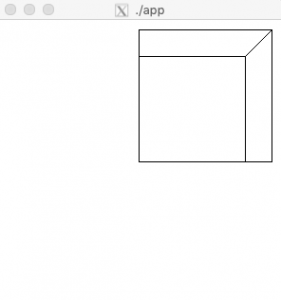
### 線画を表示する
#include
GLdouble vertex[][3] = {
{0.0, 0.0, 0.0},
{1.0, 0.0, 0.0},
{1.0, 1.0, 0.0},
{0.0, 1.0, 0.0},
{0.0, 0.0, 1.0},
{1.0, 0.0, 1.0},
{1.0, 1.0, 1.0},
{0.0, 1.0, 1.0}
};
int edge[][2] = {
{0, 1},
{1, 2},
{2, 3},
{3, 0},
{4, 5},
{5, 6},
{6, 7},
{7, 4},
{0, 4},
{1, 5},
{2, 6},
{3, 7}
};
void display(void){
int i;
glClear(GL_COLOR_BUFFER_BIT);
/* 図形の描画 */
glColor3d(0.0, 0.0, 0.0);
glBegin(GL_LINES);
for(i = 0; i < 12; ++i){
glVertex3dv(vertex[edge[i][0]]);
glVertex3dv(vertex[edge[i][1]]);
}
glEnd();
glFlush();
}
void resize(int w, int h){
glViewport(0, 0, w, h);
glLoadIdentity();
gluPerspective(30.0, (double)w / (double)h, 1.0, 100.0);
glTranslated(0.0, 0.0, -5.0);
}
void init(void){
glClearColor(1.0, 1.0, 1.0, 1.0);
}
int main(int argc, char *argv[]){
glutInit(&argc, argv);
glutInitDisplayMode(GLUT_RGBA);
glutCreateWindow(argv[0]);
glutDisplayFunc(display);
glutReshapeFunc(resize);
init();
glutMainLoop();
return 0;
}
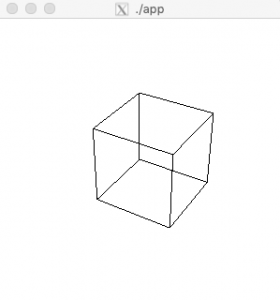
### 視点の位置を変更する
(3,4,5) の位置から原点 (0,0,0) を眺める
void resize(int w, int h){
glViewport(0, 0, w, h);
glLoadIdentity();
gluPerspective(30.0, (double)w / (double)h, 1.0, 100.0);
gluLookAt(3.0, 4.0, 5.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0);
}
凄い。