### 基礎
マザーボードの外形寸法はATXやmicroATXといった規格が定められている、更に小さいMini-ITX
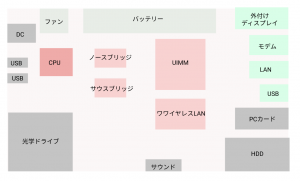
ハードディスク、光学ドライブ(CD, DVD, BlueRay)、バッテリー、CPUファンなどを配置する
BIOSはOSよりも早く起動するソフトウェアで、パソコンに接続された周辺機器を制御する
マザーボードの電源はbiosに電源を供給する
メモリースロット、拡張スロット(グラフィックカード、ネットワークカード、サウンドカードなど)、SATAポート(IDEの次に登場した新規格)など拡張性を備えている
L グラフィックカードのメーカーはZOTAC、EVGA、NVIDIA、ASUS、MSIなど
L コンピュータネットワーク内でコンピュータ間の通信を行うために使用される
L サウンドカードは音響信号の入出力機能を付加または強化する拡張用の回路基板
チップセットは以前はノースブリッジ(グラッフィックカード、メインメモリ)とサウスブリッジ(HDD、USB、光学ドライブ)があったが、ノースブリッジはCPUが担当するため、現在はサウスブリッジのみ
チップセットは集積回路の集まり、CPUの外部バスとメモリや周辺機器を接続する標準バスとのバスブリッジなどの機能を集積
### 各部品
– CPUソケット: LGA1155、LGA1150、LGA1151など
– メモリースロット
– チップセット
– 拡張スロット: PCI-E×1、PCI-E×16、PCIスロット
– SATAコネクタ
– メイン電源
– CPU電源
– BIOS電源
– CMOSクリアピン
– フロントパネルコネクタ
– USBコネクタ
– スピーカー端子
– CPUファンコネクタ
– ケースファンコネクタ
– SATA IIIポート
– USB3.0コネクター
– 外部コネクタ: LANポート、USB2.0ポート、オーディオコネクタ
– アナログRGB、VGA
– ディスプレイ端子: VGA, DVI, HDMI、DisplayPort
– 8チャンネルオーディオポート
– M.2スロット
– I/Oパネル
### メーカー
ASRock、SuperMicro、Intel、GIGABYTE、ASUS、Tyan
マザーボード作ってる会社って、接続機器の仕組み・機能を全て理解してるって事か。。。
どうなってんだこれ、尋常じゃなく凄すぎんだろ。